![]()
Training and Evaluating Static Heatmap Regression Model for Multi-Instance and Multi-Class Landmark Detetection (EndoVis 2015 Challenge)#
In this tutorial, we will train and evaluate an direct static heatmap regression model for landmark detection with EndoVis 2015 Challenge. We will use part of the EndoVis 2015 challenge dataset to construct a multi-instance and multi-class landmark detection task. The dataset contains 4 training and 6 testing videos of robotic surgery. The goal is to predict the location of instruments in the video, more specifically the tip of the clasper. We only consider the clasper points and ignore the other points, since they are way more ambiguous. One of the difficulties
The videos are transformed into images and the annotations are given as 2D points. The dataset is split into a training and testing set. The training set contains 4 videos and the testing set contains 6 videos, such as specified in the challenge.
We will go through the following steps:
Setup environment#
!python -c "import landmarker" || pip install landmarker
Setup imports and variables#
import numpy as np
import torch
from torch.utils.data import DataLoader
from monai.transforms import (Compose, RandAffined, RandGaussianNoised, RandStdShiftIntensityd,
RandScaleIntensityd, RandAdjustContrastd, RandHistogramShiftd)
from tqdm import tqdm
device = 'cuda' if torch.cuda.is_available() else 'cpu'
Loading the dataset#
fn_keys = ('image', 'seg')
spatial_transformd = [RandAffined(fn_keys, prob=1,
rotate_range=(-np.pi/12, np.pi/12),
translate_range=(-10, 10),
scale_range=(-0.1, 0.1),
shear_range=(-0.1, 0.1)
)]
composed_transformd = Compose(spatial_transformd +
[RandGaussianNoised(('image', ), prob=0.1, mean=0, std=0.005), # Add gaussian noise
RandStdShiftIntensityd(('image', ), prob=0.1, factors=0.1), # Add random intensity shift
RandScaleIntensityd(('image', ), factors=0.25, prob=0.1), # Add random intensity scaling
RandAdjustContrastd(('image', ), prob=0.1, gamma=(0.5,2)), # Randomly adjust contrast
RandHistogramShiftd(('image', ), prob=0.1), # Randomly shift histogram
])
# from landmarker.datasets import get_endovis2015_heatmap_datasets
# ds_train, ds_test = get_endovis2015_heatmap_datasets("data", sigma=3, transform = composed_transformd)
from landmarker.heatmap.generator import GaussianHeatmapGenerator
from landmarker.datasets import get_endovis2015_heatmap_datasets
ds_train, ds_test = get_endovis2015_heatmap_datasets("data", transform = composed_transformd,
grayscale=False,
dim_img = (512, 512), sigma = 3)
Reading, normalizing and resizing 940 images and landmarks...
0%| | 0/940 [00:00<?, ?it/s]/opt/conda/lib/python3.11/site-packages/torchvision/transforms/functional.py:1603: UserWarning: The default value of the antialias parameter of all the resizing transforms (Resize(), RandomResizedCrop(), etc.) will change from None to True in v0.17, in order to be consistent across the PIL and Tensor backends. To suppress this warning, directly pass antialias=True (recommended, future default), antialias=None (current default, which means False for Tensors and True for PIL), or antialias=False (only works on Tensors - PIL will still use antialiasing). This also applies if you are using the inference transforms from the models weights: update the call to weights.transforms(antialias=True).
warnings.warn(
100%|██████████| 940/940 [00:11<00:00, 82.19it/s]
Creating heatmaps for 940 images... (batch size: 32)
100%|██████████| 29/29 [00:24<00:00, 1.18it/s]
Reading, normalizing and resizing 910 images and landmarks...
100%|██████████| 910/910 [00:11<00:00, 81.61it/s]
Creating heatmaps for 910 images... (batch size: 32)
100%|██████████| 28/28 [00:25<00:00, 1.10it/s]
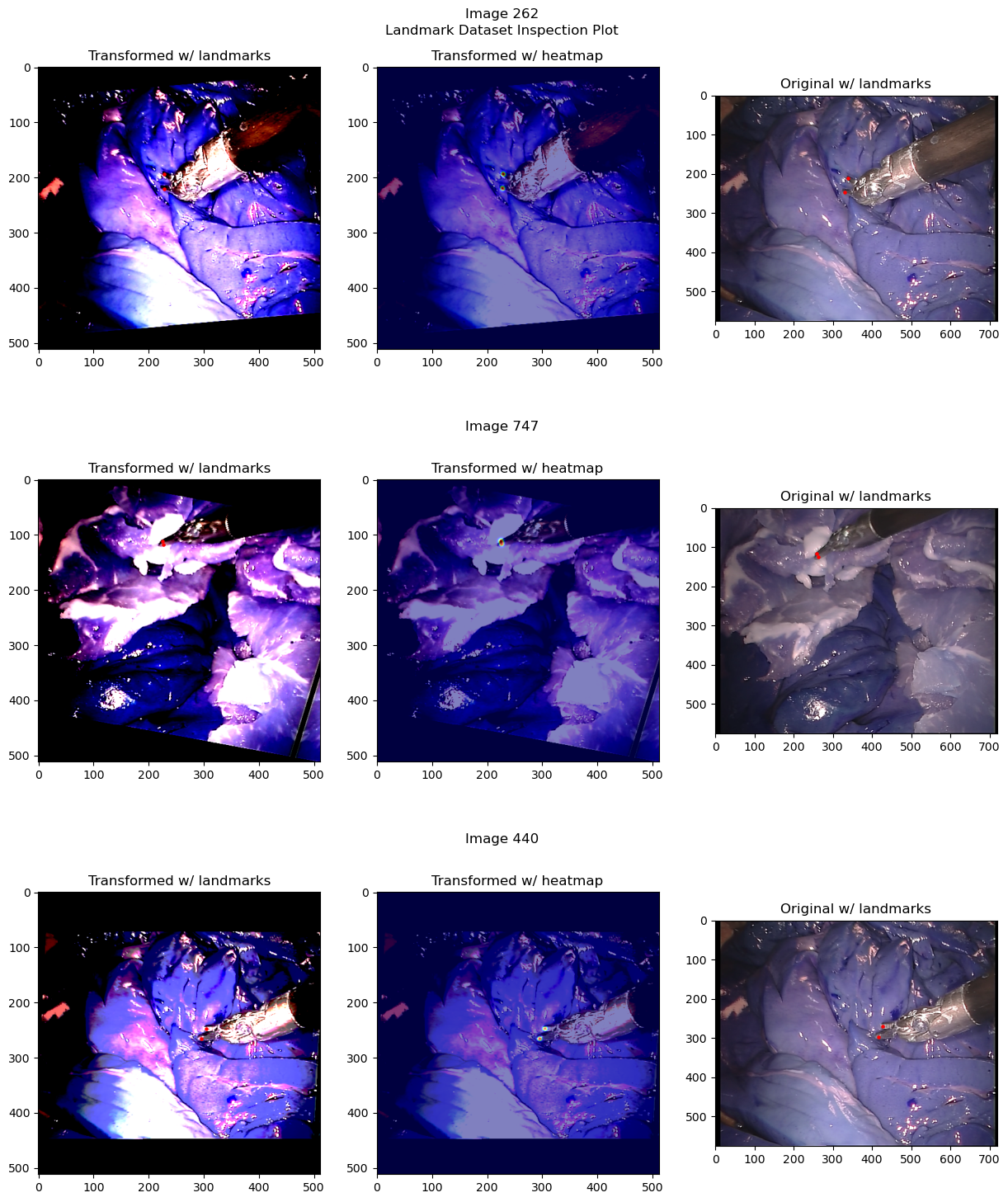
Inspecting the dataset#
from landmarker.visualize import inspection_plot
# Plot the first 3 images from the training set
inspection_plot(ds_train, np.random.randint(0, len(ds_train), 3))
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
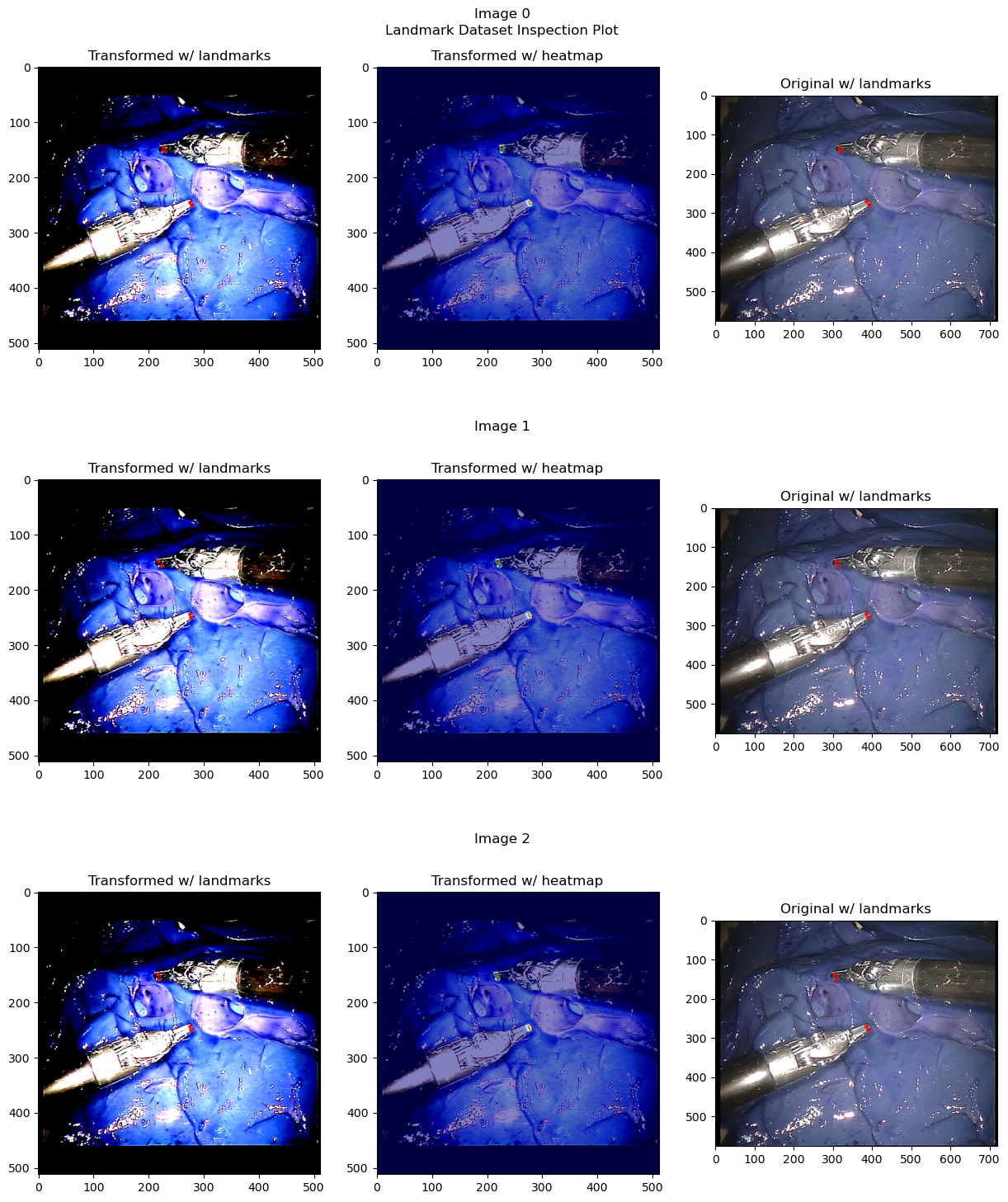
# Plot the first 3 images from the test1 set
inspection_plot(ds_test, range(3))
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Training and initializing the SpatialConfiguration model#
Initializing the model, optimizer and loss function#
from torch import nn
from landmarker.models import get_model
from landmarker.train import EarlyStopping, SaveBestModel
model = get_model("UNet", in_channels=3, out_channels=2).to(device)
lr = 1e-4
batch_size = 4
epochs = 1000
optimizer = torch.optim.AdamW(model.parameters(), lr=lr, weight_decay=1e-3)
criterion = nn.BCEWithLogitsLoss()
early_stopping = EarlyStopping(patience=10, verbose=True)
save_best_model = SaveBestModel(verbose=True)
lr_scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(optimizer, mode='min', factor=0.5,
patience=20, verbose=True, cooldown=10)
Setting the data loaders and split training set#
split_lengths = [0.8, 0.2]
ds_train_train, ds_train_val = torch.utils.data.random_split(ds_train, split_lengths)
train_loader = DataLoader(ds_train_train, batch_size=batch_size, shuffle=True, num_workers=0)
val_loader = DataLoader(ds_train_val, batch_size=batch_size, shuffle=False, num_workers=0)
test_loader = DataLoader(ds_test, batch_size=batch_size, shuffle=False, num_workers=0)
Training the model#
from landmarker.heatmap.decoder import heatmap_to_coord, heatmap_to_multiple_coord
from landmarker.metrics import point_error
from torch.nn.functional import sigmoid
from landmarker.metrics.metrics import multi_instance_point_error
def train_epoch(model, train_loader, criterion, optimizer, device):
running_loss = 0
model.train()
for i, (images, heatmaps, landmarks, _, _, _, _, _, _) in enumerate(tqdm(train_loader)):
images = images.to(device)
heatmaps = heatmaps.to(device)
landmarks = landmarks.to(device)
optimizer.zero_grad()
outputs = model(images)
loss = criterion(outputs, heatmaps)
loss.backward()
optimizer.step()
running_loss += loss.item()
return running_loss / len(train_loader)
def val_epoch(model, val_loader, criterion, device):
eval_loss = 0
model.eval()
with torch.no_grad():
for _, (images, heatmaps, landmarks, _, _, _ , _, _,
_) in enumerate(tqdm(val_loader)):
images = images.to(device)
heatmaps = heatmaps.to(device)
landmarks = landmarks.to(device)
outputs = model(images)
loss = criterion(outputs, heatmaps)
eval_loss += loss.item()
return eval_loss / len(val_loader)
def train(model, train_loader, val_loader, criterion, optimizer, device, epochs=1000):
for epoch in range(epochs):
ds_train.transform = composed_transformd
train_loss = train_epoch(model, train_loader, criterion, optimizer, device)
ds_train.transform = None
val_loss = val_epoch(model, val_loader, criterion, device)
print(f"Epoch {epoch+1}/{epochs} - Train loss: {train_loss:.4f} - Val loss: {val_loss:.4f}")
early_stopping(val_loss)
save_best_model(val_loss, model)
lr_scheduler.step(val_loss)
if early_stopping.early_stop:
print(f"Loading best model...")
model.load_state_dict(torch.load(save_best_model.path))
break
train(model, train_loader, val_loader, criterion, optimizer, device,
epochs=epochs)
# model.load_state_dict(torch.load("best_weights_unet_endovis_static.pt"))
<All keys matched successfully>
Evaluating the model#
pred_landmarks = []
true_landmarks = []
dim_origs = []
pixel_spacings = []
paddings = []
tp = []
fp = []
fn = []
test_mpe = 0
test_tp = 0
test_fp = 0
test_fn = 0
model.eval()
with torch.no_grad():
for i, (images, heatmaps, landmarks, affine_matrixs, _, _ ,
dim_orig, pixel_spacing, padding) in enumerate(tqdm(test_loader)):
images = images
heatmaps = heatmaps
landmarks = landmarks
outputs = model(images.to(device)).detach().cpu()
offset_coords = outputs.shape[1]-landmarks.shape[1]
pred_landmarks_list, _ = heatmap_to_multiple_coord(sigmoid(outputs), window=5,
threshold=0.5,
method="argmax")
pe_batch, tp_batch, fp_batch, fn_batch, pred_landmarks_torch = multi_instance_point_error(
true_landmarks=landmarks, pred_landmarks=pred_landmarks_list, dim=(512, 512),
dim_orig=dim_orig, pixel_spacing=pixel_spacing, padding=padding, reduction="none")
test_mpe += torch.nanmean(pe_batch).item()
test_tp += torch.nansum(tp_batch).item()
test_fp += torch.nansum(fp_batch).item()
test_fn += torch.nansum(fn_batch).item()
pred_landmarks.append(pred_landmarks_torch)
true_landmarks.append(landmarks)
dim_origs.append(dim_orig)
pixel_spacings.append(pixel_spacing)
paddings.append(padding)
tp.append(tp_batch)
fp.append(fp_batch)
fn.append(fn_batch)
test_mpe /= len(test_loader)
print(f"Test Mean PE: {test_mpe:.4f}")
print(f"Test TP: {test_tp:.4f}")
print(f"Test FP: {test_fp:.4f}")
print(f"Test FN: {test_fn:.4f}")
100%|██████████| 228/228 [5:51:17<00:00, 92.45s/it]
Test Mean PE: 2.8028
Test TP: 8.4474
Test FP: 0.0351
Test FN: 7.5175
from landmarker.metrics import sdr
sdr_test = sdr([4, 5, 10, 20], true_landmarks=torch.cat(true_landmarks, axis=0), pred_landmarks=torch.cat(pred_landmarks, axis=0),
dim=(512, 512), dim_orig=torch.cat(dim_origs, axis=0).int(), pixel_spacing=torch.cat(pixel_spacings, axis=0),
padding=torch.cat(paddings, axis=0))
for key in sdr_test:
print(f"SDR for {key}mm: {sdr_test[key]:.4f}")
SDR for 4mm: 43.3516
SDR for 5mm: 49.1209
SDR for 10mm: 52.4451
SDR for 20mm: 52.4451
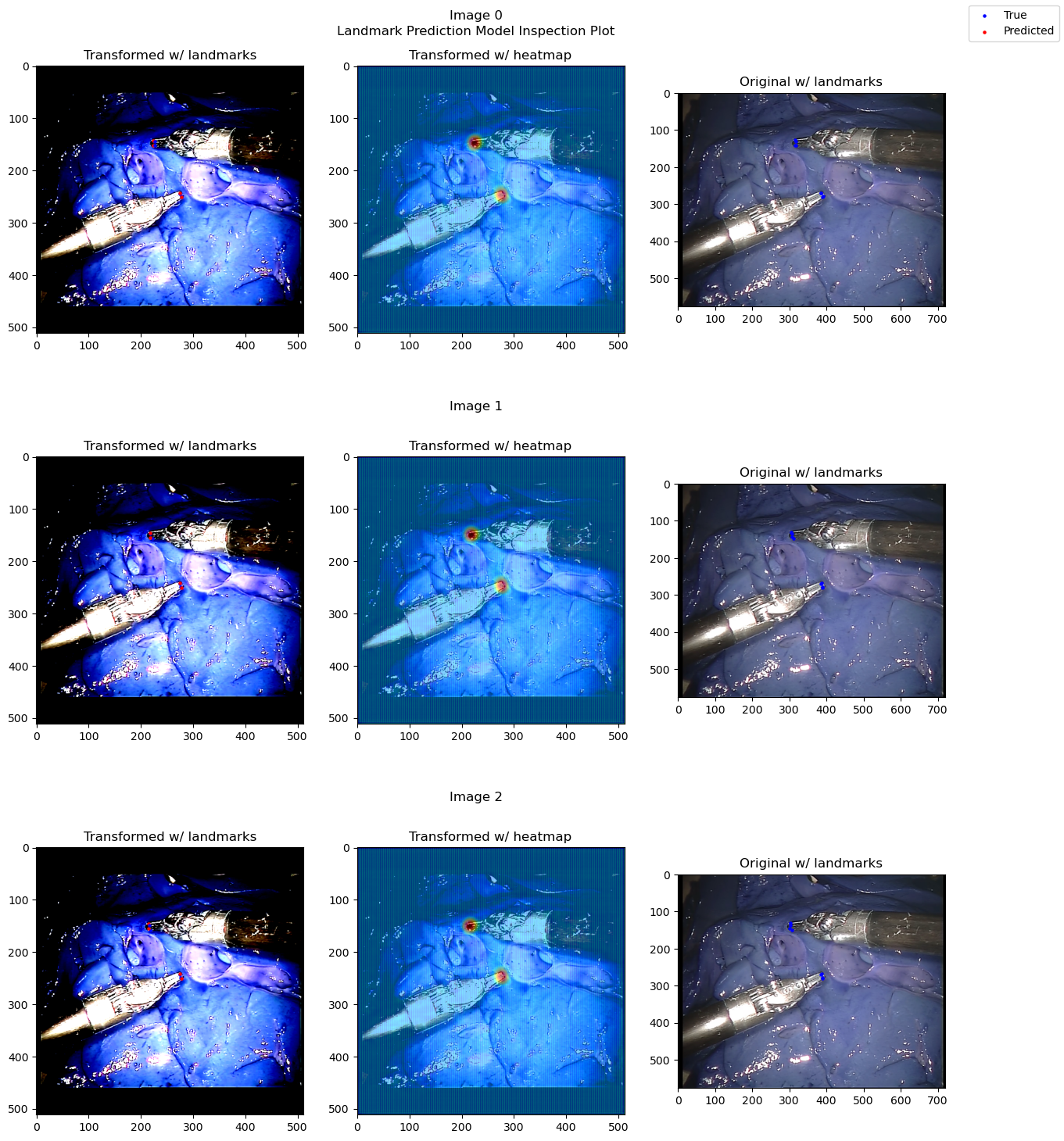
from landmarker.visualize.utils import prediction_inspect_plot_multi_instance
model.to("cpu")
prediction_inspect_plot_multi_instance(ds_test, model, range(3))
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
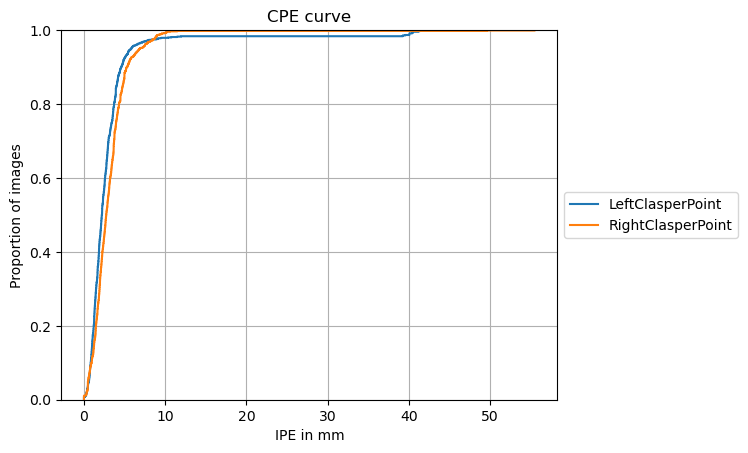
from landmarker.visualize import plot_cpe
plot_cpe(torch.cat(true_landmarks, axis=0), torch.cat(pred_landmarks, axis=0), dim=(512, 512),
dim_orig=torch.cat(dim_origs, axis=0).int(), pixel_spacing=torch.cat(pixel_spacings, axis=0),
padding=torch.cat(paddings, axis=0), class_names=ds_test.class_names,
group=False, title="CPE curve", save_path=None,
stat='proportion', unit='mm', kind='ecdf')
from landmarker.visualize.evaluation import multi_instance_detection_report
multi_instance_detection_report(torch.cat(true_landmarks, axis=0), torch.cat(pred_landmarks, axis=0),
torch.cat(tp, axis=0), torch.cat(fp, axis=0), torch.cat(fn, axis=0), dim=(512, 512),
dim_orig=torch.cat(dim_origs, axis=0).int(), pixel_spacing=torch.cat(pixel_spacings, axis=0),
padding=torch.cat(paddings, axis=0), class_names=ds_test.class_names)
Detection report:
1# Instance detection statistics:
============================================================
Class TP FP FN TPR
------------------------------------------------------------
LeftClasperPoint 959.0 6.0 861.0 0.53
RightClasperPoint 967.0 2.0 853.0 0.53
============================================================
2# Point-to-point error (PE) statistics:
======================================================================
Class Mean Median Std Min Max
----------------------------------------------------------------------
LeftClasperPoint 2.95 2.23 4.48 0.13 38.94
RightClasperPoint 2.97 2.70 2.73 0.20 55.48
======================================================================
3# Success detection rate (SDR):
================================================================================
Class SDR (PE≤2mm) SDR (PE≤2.5mm) SDR (PE≤3mm) SDR (PE≤4mm)
--------------------------------------------------------------------------------
LeftClasperPoint 23.13 30.05 36.92 45.16
RightClasperPoint 17.58 23.90 29.73 41.54
================================================================================